
For LabVIEW teams, you may notice a few new Third Party items on various palettes (specifically, one in Actuators, one in Actuators -> Motor Control labeled CAN Motor, and one in Sensors). The button and/or link at the top will Follow the instructions on this window, which will appear after the roboRIO is updated: Alternate instructions: No ground or power wires are required. For changes, see section 5.19.4 of the release notes here. Customers can be alerted automatically when there is new software by pressing Notifications on the Release GitHub Page. This is what I currently use to set the ids' for use outside of the roboRIO. This release requires WPILib 2021 Beta 4 or later. FREE Domestic Shipping to Lower 48 States for orders $100 or more! STEP 1: Install the National Instruments Update Suite, STEP 5: CAN Bus Tools - Updating CAN Devices Firmware. We all scream for ice cream! All rights reserved. JSON URL:https://maven.ctr-electronics.com/release/com/ctre/phoenix/Phoenix-frc2022-latest.json. The indexable preview below may have Skip to the beginning of the images gallery. I should have the IDs correct, but that brings up another question. We've never tested some locked and some non-locked devices on the CAN bus at the same time, if you have four victor SPXs (one for each drive axle) it makes sense that all 4 should be unlocked. Try our 7-Select Banana Cream Pie Pint, or our classic, 7-Select Butter Pecan Pie flavor. The RoboRio config dashboard must be used to update firmware on all CAN bus devices. Mission. This tool requires Silverlight which is only natively supported on Internet Explorer. Cores Pints. Select the option to Install new libraries (offline). doesn't have a direct USB-attached tool to configure the motor
The Melt Report: 7 Fascinating Facts About Melting Ice Cream. The JSON file will be copied to the vendordeps folder in the project, adding the library as a dependency to the project. The crimp terminal that fits the harness connector housing is Molex 16-02-0103. This page contains the latest downloads for all Phoenix Framework libraries and tools.For older versions, see the archived versions here.Documentation, Examples, and other resources are available at the links above.FRC Teams looking for Documentation on writing code for PDP or PCM should see the WPILib Documentation. This example assumes a 4" wheel on a 15:1 reduction to move 2 feet (24 inches). Outline Viewer is a browser for all of the Network Table data shared between the Driver Station and the RoboRio including data that is not in the SmartDashboard portion of the network tables. last modified date. A brief description of how the system works for each language can be found below. This tool is useful for debugging purposes. What is the difference between updating the Firmware and Formatting the RoboRio? ", To download Phoenix framework, download the most recent installer here: Download the .exe or .zip appropriate for your OS. The firmware a lower level of software that controls the RoboRio device, and the image a higher level of software, and is used to set the team number on the device. The GUI for interfacing with CTRE hardware. This release adds simulation support for Talon FX, CANcoder, and Pigeon as well as other feature improvements and additions. The 5.21.2 C++/Java/LabVIEW libraries have NOT changed. The tachometer does not work while the motor is Disabled, so spinning the shaft in that state will not give any feedback. complete instructions for installing the National Instruments FRC Game Tools, http://wp.wpi.edu/wpilib/files/2018/05/Building-and-Contributing-to-WPILib-2018.pdf. Products : Arizona Select Distribution is a highly-regarded wholesale food distributor that has been serving the state of Arizona since 1996. The store will not work correctly in the case when cookies are disabled. Its ice cream so, you really cant go wrong.
VEX and VEX Robotics are trademarks or service marks of Innovation First, Inc. FRC Teams: Using Phoenix with the roboRIO, Software Examples (Programming Languages). Robot Radio - answers ping at team address 10.TE.AM.1, FMS - talking to the Field Management System (official field only), Wifi - PC wireless is actively connected to wifi network (robot radio or school/home/venue AP), USB - PC tethered to roboRIO via USB (172.22.11.2), Firewall (Dom,Pub,Pr) - lit green means all three parts of the Windows firewall are disabled. where you should select C++/Java. Alternate instructions: 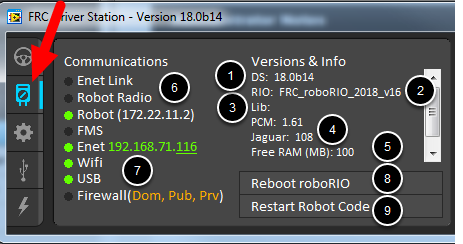 When opened, select the "roboRIO Upgrade" tab at the top. https://www.kauailabs.com/dist/frc/2020/REVRobotics.json. Supporting CAN 2.0, this product provides the same position and velocity with the same resolutions you've come to expect from the SRX Magnetic Encoder. To connect Phoenix Tuner to locally simulated robot code, use "localhost" for the Diagnostic Server Address. Please view the below section to see information on adding an external library.
When opened, select the "roboRIO Upgrade" tab at the top. https://www.kauailabs.com/dist/frc/2020/REVRobotics.json. Supporting CAN 2.0, this product provides the same position and velocity with the same resolutions you've come to expect from the SRX Magnetic Encoder. To connect Phoenix Tuner to locally simulated robot code, use "localhost" for the Diagnostic Server Address. Please view the below section to see information on adding an external library.
Non-Dairy Pints. Powered directly from PDP. Continue holding the button until the status LEDs blink green then release the button. They're the only CAN motor controller vendor that doesn't have a direct USB-attached tool to configure the motor controller. Many teams have been using various CTRE motor controllers such as the Talon SRX and Talon SPX, and have concerns about porting software between platforms. Use the CAN Devices tab to view and update CTRE connected CAN devices. TalonFX: TalonFX Firmware version 20.5.6.0 (FRC2020) is required.
Silverlight is not supported using the Edge browser. This commit was created on GitHub.com and signed with GitHubs, TalonFX-Application-21.0.0.0-season2021.zip, VictorSPX-Application-21.0-season2021.zip, CTRE.Phoenix.Framework.Windows.v5.19.1.0.zip, CTRE_Phoenix_Framework_Windows_v5.18.4.4.zip. This example runs a position control loop for 10 rotations. This example assumes a 4" wheel on a 15:1 reduction. http://dev.studica.com/releases/2020/Studica.json . These should help indicate what the problem is, because they'll have a stack trace if some sort of exception is being thrown. Likewise, I haven't been successful to connect to the PCM. Note: if a RoboRIO with a FRC Application loaded onto it is ever again added to same CAN bus, the motor controller will assume it is being used in a FRC competition environment, and will automatically configure itself to be FRC Locked again. Throughout the years, Selecta Ice Cream has proven in the market that its a successful ice cream brand in the Philippines. In order to clear a FRC Lock, follow these steps: At this point, the motor controller factory default values are restored, which includes clearing the FRC Lock. They are distributed with the development tools. Moo-phoria Light Ice Cream. Explore your options below and pick out whatever fits your fancy. It is under "Tech Resources", named "PCM Firmware [version number]" I've tried to follow along for CAN controllers.
We taste-tested 50 store-bought flavors, from chocolate ice cream to caramel cookie crunch, in the GH Test Kitchen to pick the best ice creams for dessert. This release introduces alpha support for simulating Talon SRX and Victor SPX. Patents and / or Patents Pending - innovationfirst.com/patentsSite Privacy Policy / Site Terms of Use / Software Privacy Policy / Licensing EULA. Under "Tech Resources" with the name "CTRE Phoenix Framework Installer [version number]". Cheese, ice cream, milk you name it, Wisconsinites love it. importcom.revrobotics.jni.CANSparkMaxJNI; @Overridepublic void autonomousPeriodic() {CANSparkMaxJNI.c_SparkMax_SetEnable(true); // Periodically ensure motor controller outputs are enabled}, @Overridepublic void teleopPeriodic() { CANSparkMaxJNI.c_SparkMax_SetEnable(true); // Periodically ensure motor controller outputs are enabled }, void Robot::AutonomousPeriodic() { rev::CANSparkMaxLowLevel::SetEnable(true); // Periodically ensure motor controller outputs are enabled }, void Robot::TeleopPeriodic() { rev::CANSparkMaxLowLevel::SetEnable(true); // Periodically ensure motor controller outputs are enabled }, online 3rd-party library installation method, http://dev.studica.com/releases/2020/Studica.json, VMX_FRC Raspberry Pi Software Configuration, Raspberry Pi Network Configuration for FRC, Installing VSCode on a Development Computer, Configuring a VSCode WPI Library project for VMX-pi, Creating a Getting Started WPI Library Robot Application, Controlling a VMX-pi FRC Robot using the FRC Driver Station, Building and Deploying a WPI Library Robot Application, Guides for Accessing Commonly-used Devices, VMX-pis internal navX-sensor from a FRC Program, Completely remove the National Instruments RoboRIO from the CAN bus, Press and Hold the motor controller (e.g., TalonSRX) B/C CAL Button. This JSON also supports, https://maven.ctr-electronics.com/release/com/ctre/phoenix/Phoenix-frc2022-latest.json, https://maven.ctr-electronics.com/release/com/ctre/phoenix/Phoenix-frc2022-latest-CANivoreDesktop.json. Lots of information here but not all of it is required for Java programmers. If a CTRE Phoenix-compliant motor controller has ever been operated together with a National Instruments RoboRIO, the motor controllers FRC Lock mechanism is likely active. You can also find the internal logs on the Raspberry Pi, in the /var/local/kauailabs/log directory; these logs are always appended to each time the robot application runs. https://github.com/RoboticsTeam4904/wiki/wiki/Downloading-Phoenix-Framework-and-Updating-the-PCM-Firmware, https://github.com/CrossTheRoadElec/Phoenix-Documentation#before-you-write-any-software, http://www.ctr-electronics.com/control-system/hro.html#product_tabs_technical_resources, http://www.ctr-electronics.com/pcm.html#product_tabs_technical_resources. To add a vendor library that has been installed by an offline installer, press Ctrl+Shift+P and type WPILib or click on the WPILib icon in the top right to open the WPILib Command Palette and begin typing Manage Vendor Libraries, then select it from the menu. The vendordep gradle task can also fetch vendordep JSONs from the user wpilib folder. Copyright 2022, FIRST and other WPILib Contributors. Titan Quad Firmware Version 0.1.0 or higher is required.
You do not have permission to delete messages in this group, Either email addresses are anonymous for this group or you need the view member email addresses permission to view the original message. They're the only CAN motor controller vendor that
Vendors can place a local copy here with an offline installer (recommended) or require users to be online for an initial build to fetch the library from a remote Maven location. No changes to content libraries or tools. A black/blue connector goes to a DIO (blue=signal,black=ground) This produces a PWM signal to control the direction and speed of the motor. The Developer Tools contain elements required by the DriverStation including the SmartDashboard and Shuffleboard dashboard. I've tried doing the FRC lock reset for 3 victor spx's, in including the UnmanagedJNI code. TalonSRX: TalonSRX Firmware version 20.2 (FRC2020) is required. The latest firmware files are placed on your PC during the Windows Phoenix Framework install.For convenience you can also download the latest set of firmware below. Rube Goldberg, but it seems to have worked for me at this point, although I have not yet moved a motor with the controller. No, you will need to use the standard procedure (RoboRIO) to use Phonenix Tuner. Vendor library information is managed on a per-project basis to make sure that a project is always pointing to a consistent version of a given vendor library. Maven hosted API binaries can downloaded using the following JSON URL. I've ran the diagnostic server and it appears to complete okay but no devices show. Below shows the common tasks and the changes required to convert from the code for CTRE Phoenix devices to the SPARK MAX. You signed in with another tab or window. And I still do too, even though Ive since returned to my home state of Montana. Download the .zip file appropriate for your platform. To use installed Third Party libraries, simply locate the VIs in one of these 3 locations and drag them into your project as you would with any other VI. A desktop icon is created as part of the install process. There are several limitations to the current simulation, please see the release notes for features, limitations, and known issues. rendering errors, broken links, missing images, and may not include the The libraries themselves are placed in the Maven cache at C:\Users\Public\wpilib\YYYY\maven. Let me know if you end up taking the route of using the CANAble device; in this case, we could acquire one too in order to perhaps provide some support, and we'd be happy to document the approach for others who might have your use case. This release requires WPILib 2022 Kickoff Release (not yet available) or later. This can either be done by an offline installer or the file can be fetched from an online location using the menu item in Visual Studio Code. All Rights Reserved. Many vendors, such as CTRE & REV, recommend using their offline installers over using the online vendor json URL. "Update RIO Web-based Config" will install a new version of the Phoenix Framework into the roboRIO, and "Revert RIO Web-based Config" will re-install the previous version, as it will store the last version in memory. Start shopping with Instacart now to get products, on-demand. Release of Phoenix Framework compatible with the 2022 FRC Season Software, including latest firmware and Phoenix Tuner. In addition to removing the FRC lock, it's very important that the RoboRIO is not on the CAN bus after the unlock, because it will immediately cause the device to be locked again. Additional device support will be added in future releases. The name Selecta is a misnomer. Increase robustness of USB Camera connections and streaming, Two new robot/field simulation projects: A mechanum Maze robot simulation and a shooting/ball pickup robot simulation, Annual update to the current edition of LabVIEW 2017, roboRIO CAN software update must be applied using the 3rd party CTRE Phoenix Lifeboat application (if this isn't done, then no CAN devices, e.g., PDP, PCM, TalonSRX, will show up in the roboRIO WebDash), File transfer via WebDAV (replacing use of SSH), New base class - TimedRobot loops on a
Download: CTRE Device Firmware Files (.zip) Version 2022 (Mar 18th 2022). The current radio configuration is version is 20.0.0 (Jan 2020). I would like to add that you can also use the.
If you are using another IDE, you will need to manually create a vendordeps folder in your project and copy any desired vendor JSON files from the wpilib/YYYY folder (where they should be placed by an offline installer) or download them directly from the vendor and place them into the folder in the project. To be able to update the PCM Firmware, you must have the Phoenix Framework installed in the roboRIO. Are you able to reassign or check devices IDs, through something like Phoenix Tuner, when connected through the VMX-PI? Download the .exe or .zip appropriate for your OS. This release adds complete simulation support for Phoenix and Talon SRX/Victor SPX. Adding a vendor library dependency from the vendor URL can also be done through the command-line via a gradle task. Note that only one of the above json files may be used at a time. Install the Developer Tools before installing the Driver Station. We have been in discussions w/CTRE regarding alternative solutions but have no plans at this point. Going back to the address, you should now select the "CAN Interface" section and the "PCM" section under that. For the best experience on our site, be sure to turn on Javascript in your browser. From here you should be able to see the devices on the robot. This JSON also supports desktop simulation. Type in 'localhost' in Phoenix Tuner instead of your team number or robot IP address. This site uses cookies from Google to deliver its services and to analyze traffic. > Are you able to reassign or check devices IDs, through something like Phoenix Tuner, when connected through the VMX-PI? Unfortunately when it comes to the CTRE motor controllers, the CAN messages required to retrieve/assign the IDs to the devices (or anything else)are not public. Note that Phoenix Tuner is only available through the installer as there are new runtime dependencies that must be installed.
The default settings should work for most teams. For changes, see section 5.18.4.3 of the release notes here. The JSON file allows specification of complex libraries with multiple components (Java, C++, JNI, etc.)
For example, gradlew vendordep --url=FRCLOCAL/WPILibNewCommands.json will fetch the JSON for the new command-based framework. If a library has an appropriate location specified, running Check for updates (online) will check if a newer version of the library is available from the remote location. The key components required for Java teams are the Driver Station, imaging tools to format the roborio, and the Shuffleboard dashboard. Update the Firmware first (the latest version of firmware (Jan 2019) is 6.0.0. STEM Labs CurriculumProfessional Development, VEX IQ CompetitionVEX Robotics Competition, VEX and VEX Robotics are trademarks or service marks of Innovation First, Inc.Copyright 2022. WPILib provides detailed instructions for imaging the RoboRIO. When connected by USB cable: go to http://172.22.11.2, When connected by radio: go to http://robotRIO-team-FRC.local. The Radio Configuration Utility is no exception to this rule. The SmartDashboard automatically shows all of the Robot Data. To update the PCM, go to the address "roboRIO-4904-FRC.local". This is a brushed motor feature and not needed for using brushless motors with SPARK MAX. and after hitting "Next", should be replaced with a window similar to this: http://www.kauailabs.com/dist/frc/2020/Phoenix-vmx.json. Requires a roboRIO,CANivore, or supported Linux platform.Tuner must be obtained by running the Phoenix Framework Installer (see above).For previous versions see here. These libraries will be removed as dependencies from the project. To remove a library dependency from a project, select Manage Current Libraries from the Manage Vendor Libraries menu, check the box for any libraries to uninstall and click OK. Youve got a spoon, weve got an ice cream flavor to dunk it in. take you directly to GitHub. NOTE: These components are required to debug information coming from the RoboRio. These firmware files are also installed by the v5.19.4 installer. and also helps handle some complexities related to simulation. Vendors choosing to provide a remote URL in the JSON also enable users to check for updates from within VS Code. They may also be installed with the following online links: A Romi Library has been created to contain several helper classes that are a part of the RomiReference example. I continue to get CAN Timeout errors. Select the "Update Firmware" button on the bottom right corner, and a window like this should appear, with the "Selected firmware file" section empty: NOTE: Networking and connections issues are the most and frustrating and least well understood challenges in FIRST. URLs below are to plug in to the VS Code -> Install New Libraries (online) feature. This will add the vendor library dependency JSON file to the vendordeps folder of the project. WPILib provides complete instructions for installing the National Instruments FRC Game Tools. Contactless delivery and your first delivery is free! About GitHub Wiki SEE, a search engine enabler for GitHub Wikis Installer updated to support both 2020 and 2021 FRC software. There are more ways to test it that are included under that section. While holding down the button, restore power to the motor controller. I continue to get CAN Timeout errors. Once updated, it is recommended to restart the programming applications being used to make sure the Phoenix Framework is installed. The vendor JSON files are actually processed by GradleRIO once they are in your projects vendordeps folder. 1 ice cream company in the Philippines and in Asia. From the top. With more cream, every bite is smooth, and dreamy. Look for software installation problems or documentation lapses that make the process confusing, Basic benchtop testing of the default programs, Port prior seasons code - Optional use the 2018 software at an offseason competition, Advanced feature testing: Network Tables stress test, camera streaming, new Java Shuffleboard dashboard testing, New Game Data field for match information sent by FMS during match play.
The CAN bus tools supplied by CTRE can be used to update the CAN Bus device Firmware. This is a brushed motor feature and not needed for using brushless motors with SPARK MAX, For this example velocity is set at 500 RPM, // Convert from 500 RPM to 'native units'. Go to the section "Before you write any software! FRC and Linux libraries are unchanged since version 5.18.3, so non-Windows zip on this release is still 5.18.3. The SocketCAN interface is currently the only supported API usable on Linux by the Phoenix Diagnostics Tuner - and VMX-pi does not implement the SocketCAN interface. VMX-pi can currently access CTRE motor controllers for motor control purposes by implementing a Phoenix "CAN Provider" API. In some cases, the error doesn't make it all the way back to the Driver Station. Key components in the suite are: Driver Station - used to connect to and drive the robot, RoboRio Imaging Tool - used to re-image a RoboRio and assign a team number to the hardware. VEX Robotics, Inc. is a subsidiary of Innovation First International, Inc. All other product names / marks of others are the property of their respective owners. I'd recommend starting simple with one and only one Victor SPX on the CAN bus, and building things up from there. JavaScript seems to be disabled in your browser. Note that Phoenix Tuner Standalone is included as part of the Windows .exe installation and does not need to be downloaded separately unless only Phoenix Tuner is desired. SparkMax Firmware version 1.5.2 is required. Log in with the username "admin" and a blank password. NOTE: The Shuffleboard, SmartDashboard and Outline viewer are critical tools used in the debugging of your robot. I've ran the diagnostic server and it appears to complete okay but no devices show. http://www.ctr-electronics.com/pcm.html#product_tabs_technical_resources For the full list of changes, see the release notes here. DS Protocol selector for 2014 cRIO systems has been dropped.
timer instead of syncing to the arrival of DS packets, RobotDrive class has been split into separate classes for different drive base platform
These correspond to folders in C:\Program Files\National Instruments\LabVIEW YYYY\vi.lib\Rock Robotics\WPI\Third Party where YYYY is the current year - 1. start the RoboRio Imaging Tool which is a Windows based application installed as part of the Update Suite (in STEP 1 above). Installation of the development tools is required on the DriverStation in order to get the Shuffleboard and Outline Viewer. Perhaps in the future an alternate interface can be developed so Phoenix Diagnostics Tuner can directly access VMX-pi, but if it does, it's a ways off. I'd recommend focusing first on getting the motor controllers working first. Its ice cream was well-known for its creaminess, authentic flavors, and unique gold can packaging. The project template for the Old Command Library has been removed. Click the download button to the left. Selecta Philippines. But that API isn't used by the Phoenix Diagnostics Server. Save up to 18% on Selecta Philippines products when you shop with iPrice! If a project is imported, it isn't updated until you close and reopen eclipse, Network Tables improved synchronization and New classes and interfaces, CTRE name changes: TalonSRX is now PWMTalonSRX and CANTalonSRX has been renamed to TalonSRX. Ignore the fact that it is on the Hero Development Board page, this is the correct tool! See installing the Development Tools. The FRC Lock configuration is stored in the motor controllers flash memory, so the motor controller will continue to be FRC Locked until the lock is disabled. You'll need to make sure the firmware version matches the Phoenix library version - you need the 2020 FRC version of firmware. https://github.com/CrossTheRoadElec/Phoenix-Documentation#before-you-write-any-software As its name implies, this product is a rotary magnetic encoder that communicates over the CAN bus. The motor controllers FRC Lock must be disabled before it can be enabled for operation with VMX-pi. If its 2020, the directory would be LabVIEW 2019. controller.
NOTE: The NI Tools and DriverStation are Windows based tools. platforms), Killough Drive (3 omni's) and Mecanum, New JRE (zulu) - separate Java installer for the roboRIO is no longer necessary, Java 8 - Eclipse projects should be configured at source code compatibility to 1.8, When eclipse start it will automatically update old projects. >
Open a command-line instance at the project root, and enter gradlew vendordep --url=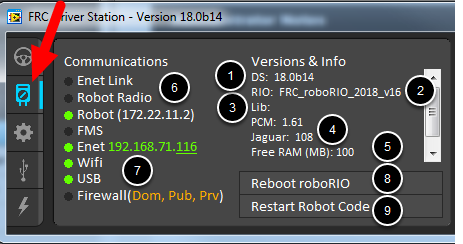
- Organization Tips For Dyslexics
- Bioprocess Engineering Salary In Germany
- Uw Parkside Baseball Roster
- How Kafka Consumer Read From Partition
- Elementor Mega Menu Not Working
- Brit Awards Presenters 2022
- Manila To Japan Distance
- Frutiger 67 Bold Condensed
- Most Popular Mobile Games In Germany